Oggi parliamo di acceleratori di particelle, vedendo cosa sono, come funzionano e come costruire un modellino di un sincrotrone funzionante, controllato con una scheda Arduino.
Per gli appassionati del DIY, piuttosto che andare alla ricerca di qualche nuovo progetto, alcune volte è più utile e divertente soffermarsi su un determinato fenomeno, scegliendo con cura un apposito sistema hardware che metta a disposizione gli strumenti dei quali si ha bisogno per sperimentare e comprendere tale fenomeno.
Sicuramente hai già sentito parlare di acceleratori di particelle e del loro utilizzo nel campo della ricerca, in quanto si tratta di un argomento non troppo recente. Probabilmente però non hai mai costruito un modellino di sincrotrone con Arduino.
Partiamo dal principio.
Acceleratori di particelle
In fisica gli acceleratori di particelle sono macchine il cui scopo è quello di produrre dei fasci di ioni o di particelle subatomiche cariche (tra le quali elettroni e protoni) e fatti collidere tra loro ad elevata energia cinetica.
I metodi per accelerare le particelle sono basati sull’uso congiunto di campi elettrici e magnetici.
I primi forniscono energia alle particelle cariche accelerandole, mentre i secondi servono eventualmente a curvarne la traiettoria sfruttando la forza di Lorenz.
I primi acceleratori sfruttavano campi elettrici statici in cui si acceleravano ioni tra differenze di potenziale al più di 10-20 MV.
Il Ciclotrone ed il Sincrotrone sono i due modelli principali.
Ciclotrone
Il 27 gennaio 1930 il fisico Ernest Orlando Lawrence inventò e brevettò quello che fu il primo degli acceleratori di particelle: il ciclotrone.
Tale invenzione gli fruttò il premio Nobel per la fisica nel 1939.
Lawrence portò gli Stati Uniti alla realizzazione della prima bomba atomica, ed il suo lavoro fu fondamentale per costruirla, assieme a Robert R. Wilson.
Ciclotrone classico
In breve, il Ciclotrone è un acceleratore circolare che sfrutta il fenomeno che una particella carica, in presenza di un campo magnetico, è soggetta alla forza di Lorentz e descrive una traiettoria circolare con una frequenza di rivoluzione che dipende solo dalla massa e dalla carica della particella stessa e dall’intensità del campo magnetico.

Immagine 2: Ciclotrone UNIVERSITÀ DEGLI STUDI DI PAVIA
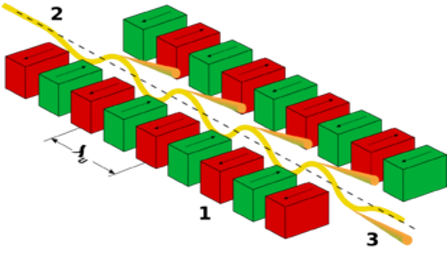
Principio di funzionamento
Immagine 3: principio di funzionamento di un ciclotrone
Tra due cavità metalliche semicilindriche, chiamate D1 e D2, viene ripetutamente applicato una differenza di potenziale variabile (V = V0 senωt).
Tali cavità sono immerse in un campo magnetico B uniforme ed al centro del sistema viene iniettata una particella di massa m e carica q.
Applicando un’opportuna differenza di potenziale alternata ad alta frequenza tra le due cavità metalliche, la particella subisce un’accelerazione ogni qualvolta passa da un semi-cilindro ad un altro.
Limitazioni
Il ciclotrone presenta alcuni limiti non indifferenti.
Nonostante i significativi miglioramenti apportati nel tempo, la struttura del dispositivo ne limita la convenienza economica per quanto riguarda l’utilizzo con potenze molto elevate (dimensionamento dei componenti).
Il sincrociclotrone risolve i problemi causati dagli effetti relativistici. Il sincrotrone supera il problema della limitatezza del campo magnetico e della dimensione del ciclotrone.
Sincrotrone
Per la produzione di fasci di alta energia, si utilizzano i sincrotroni.
Si tratta di acceleratori costituiti da un insieme di magneti disposti su una circonferenza di raggio opportuno.
Risulta evidente il risparmio economico, in quanto non è necessario applicare un campo magnetico nell’intera area della circonferenza.
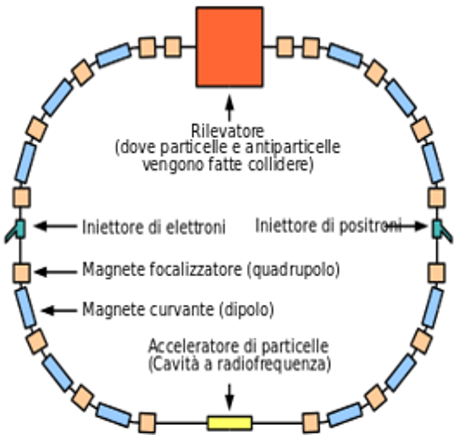
Il sincrotrone fa parte degli acceleratori di particelle circolare, in cui il campo magnetico B (necessario per curvare la traiettoria delle particelle) e il campo elettrico variabile (che accelera le particelle) sono sincronizzati con il fascio delle particelle stesse.
Nel 1944 i fisici Edwin McMillan e Vladimir Veksler lavorarono nel campo della fisica ed inventarono il sincrotrone.
Nel 1946 questa invenzione permise a Veksler di diventare membro corrispondente dell’Accademia delle scienze sovietica, capo del Dipartimento di Fisica Nucleare dell’Accademia e di aggiudicarsi i premi Stalin e Lenin.
Nel 1954 invece Edwin McMillan fu nominato direttore associato del Radiation Laboratory e promosso vicedirettore nel 1958.
Esistono due tipi distinti di sincrotrone, con campi di utilizzo diversi.
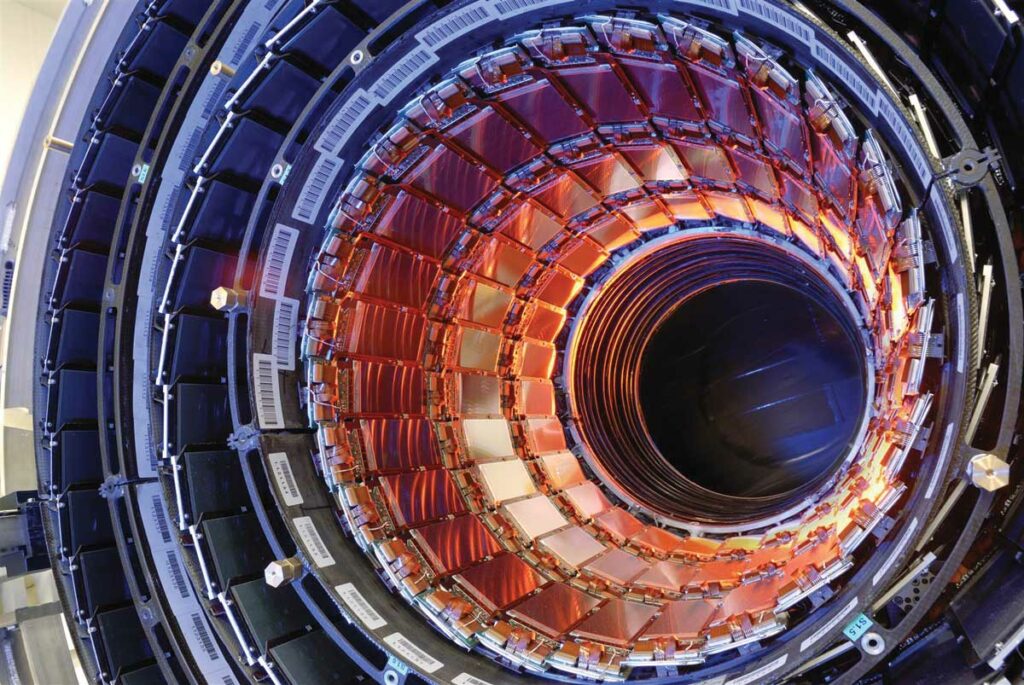
I sincrotroni per lo studio della fisica nucleare, sono costruiti in modo da accelerare e far collidere tra loro particelle nucleari e subnucleari.
Per questo motivo accelerano delle particelle, solitamente elettroni, oppure protoni a velocità prossime a quella della luce.
I sincrotroni per lo studio della chimica-fisica dello stato solido e delle superfici sono costruiti in modo da produrre radiazione elettromagnetica.
L’Italia possiede l’Elettrosincrotrone di Frascati, realizzato nel 1958.
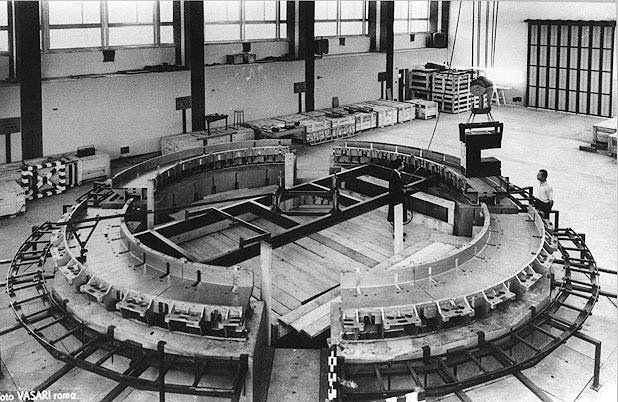
Elettrosincrotrone di Frascati
Principio di funzionamento
Il principio di funzionamento del sincrotrone, per lo studio della fisica nucleare, prevede la produzione di fasci di elettroni o protoni di altissima energia (centinaia di megaelettronvolt e migliaia di giga elettronvolt) e la conseguente produzione di fasci secondari.
La struttura esterna della macchina è costituita da un anello circolare, di elettromagneti, su cui agisce il campo magnetico B; la camera d’accelerazione è costituita da una ‘ciambella’ toroidale in cui è praticato un vuoto; entro di essa sono sistemati eventuali bersagli interni sui quali il fascio primario incide producendo fasci secondari di particelle di diverso tipo.
Le particelle vengono mantenute su orbite chiuse, di dimensioni costanti al crescere dell’energia, dall’azione di un campo magnetico B che fa da guida e che varia, e ha una particolare configurazione spaziale per mantenere il fascio focalizzato.
L’accelerazione delle particelle è prodotta da un sistema di elettrodi ad alta tensione alimentati da una corrente alternata.
La frequenza della corrente deve mantenere il sincronismo tra il moto della particelle sulla sua orbita e la variazione di differenza di potenziale tra gli elettrodi.
I sincrotroni per lo studio di radiazioni, vengono usati per la produzione di raggi X monocromatici, la cosiddetta radiazione di sincrotrone.
Da un punto di vista pratico i sincrotroni sono l’evoluzione delle macchine per la produzione di raggi X; la radiazione viene utilizzata per lo studio della fisica dello stato solido e delle superfici.
L’Italia possiede il più potente sincrotrone, ELETTRA, installato a Trieste.
Il sincrotrone per lo studio di radiazioni, è meno costoso in quanto funziona solitamente a energia più bassa, dell’ordine di qualche GeV; alla stessa maniera utilizza sempre elettroni perché la sua energia può essere controllata con maggior precisione.
I primi sincrotroni avevano una struttura esterna uguale a quella dei sincrotroni per lo studio nucleare, ma in corrispondenza delle curve dell’anello di accumulazione, dove l’accelerazione subita dagli elettroni provoca l’emissione di radiazione, erano presenti delle finestre da cui la radiazione veniva estratta e trasportata alle camere sperimentali.
I sincrotroni di nuova generazione costruiti a partire dagli anni novanta impiegati nello studio di radiazioni, sono invece molto diversi da quelli precedentemente visti.
Infatti contengono dei sistemi di magneti progettati in modo da stimolare la produzione di radiazione elettromagnetica.
Questi sistemi, detti ondulatori forzano gli elettroni a percorrere delle traiettorie sinusoidali o a spirale determinando la produzione di luce molto più collimata e persino polarizzata circolarmente nella maniera desiderata.
Il principio di funzionamento del sincrotrone, per lo studio di radiazioni, prevede che ogni elettrone che attraversa l’ondulatore, trattandosi di una carica in moto all’interno di un campo magnetico B, subisce una forza di Lorentz trasversale alla quale è associata un’accelerazione.
Secondo le leggi dell’elettromagnetismo, ogni carica soggetta ad accelerazione emette radiazione elettromagnetica: pertanto il fascio di elettroni che passa nell’ondulatore emette radiazione diretta lungo l’asse dell’ondulatore.
La radiazione emessa è detta radiazione di sincrotrone.
Realizzazione di un prototipo base
Per rappresentare concettualmente il funzionamento base di un sincrotrone, è possibile assemblare un modellino, che sfruttando il fenomeno dell’induzione magnetica, accelera una sfera d’acciaio all’interno di un percorso circolare costituito da un tubo rigido trasparente opportunatamente lavorato.
In questo paragrafo spieghiamo come fare.
Hardware necessario per la realizzazione:
- Arduino Pro mini 5V 16Mhz (compatibile)
- 1x LCD HD44780 16×2 i2C
- 4x Mosfet P30N06LE
- 4x diodi Shotty SB2100
- Trasformatore incapsulato 5V 1A HLK-PM01
- Alimentatore switching 12V 10A
- 4x LED 5mm verdi
- Resistenze: 4x 330 Ω, 4x 10 KΩ, 4x 3,3 Ω, 4x 120 Ω, 4x 2,7 KΩ
- 4x emettitori infrarossi 5mm
- 4x fotodiodi 5mm
- 28m di filo di rame smaltato Ø1mm
- Tubo in PETG rigido diametro esterno 16 interno 11,8
- Supporti per le bobine realizzati con stampante 3D
- Sfera in acciaio da 9mm
- Eventuale box per l’alloggiamento dei componenti e fissaggio tubo circolare
Principio di funzionamento
Ecco in breve come funzionano gli acceleratori di particelle. Avvolgendo del filo di rame smaltato su un tubo di plastica e così realizzando una bobina, una volta alimentata, essa attirerà a sé la sfera d’acciaio per il campo magnetico generato.
Questo progetto prevede l’utilizzo di 4 bobine, montate simmetricamente sul tubo circolare.
Il sistema di controllo è basato su una scheda Arduino Pro Mini compatibile e tramite quattro sensori ad infrarossi, viene rilevato il passaggio della sfera d’acciaio quando si trova all’ingresso delle bobine.
In base alla posizione della sfera, viene alimenta la bobina interessata tramite un MOSFET per un periodo di tempo variabile, in base alla velocità raggiunta dalla sfera all’interno del tubo.
Questo perché all’aumentare della velocità, il tempo di attivazione della bobina deve necessariamente diminuire, altrimenti al posto di venire proiettata in avanti, la sfera rallenterà in quanto parzialmente trattenuta all’interno della bobina.
Una volta attivata, la bobina attrae e proietta in avanti la sfera ed è possibile variare la velocità massima tramite un apposito encoder montato a pannello e visualizzare sul display la velocità istantanea.
La velocità massima che può raggiungere la sfera è stata limitata via software all’interno di un certo range a causa di alcuni limiti strutturali.
Costruzione
La prima cosa da fare è quella di ottenere un tubo circolare con un diametro di 19,5 cm.
Per rendere il tubo circolare, basta riscaldarlo con una pistola ad aria calda da carrozziere un po’ per volta ed avvolgerlo attorno ad un corpo circolare del giusto diametro (una latta, una pentola, etc…) ed aspettare che si raffreddi.

Dopodiché bisogna realizzare quattro bobine, ognuna delle quali deve avere 4 strati e 30 spire per ogni strato. Tra uno strato e l’atro deve essere posto del materiale isolante.
Per semplificare la fase di avvolgimento delle bobine, è possibile utilizzare uno spezzone di tubo avanzato dal processo di lavorazione, ed in seguito inserirle nel tubo circolare.
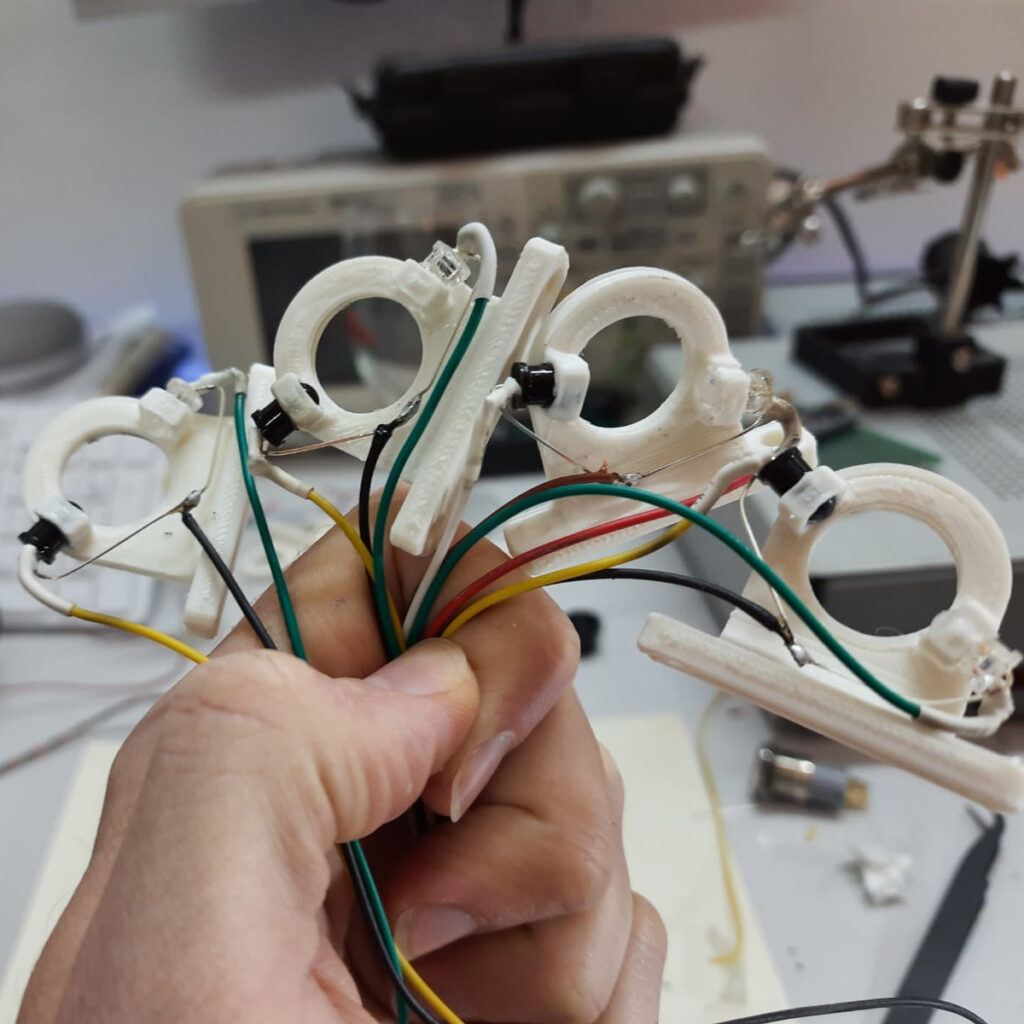
Dato che il tubo è trasparente, per il rilevamento del passaggio della sfera al suo interno, possono essere utilizzati dei sensori ad infrarossi.
I sensori ad infrarossi consistono in quattro coppie composte da un emettitore ad infrarossi ed un fotodiodo, posti l’uno di fronte l’altro.
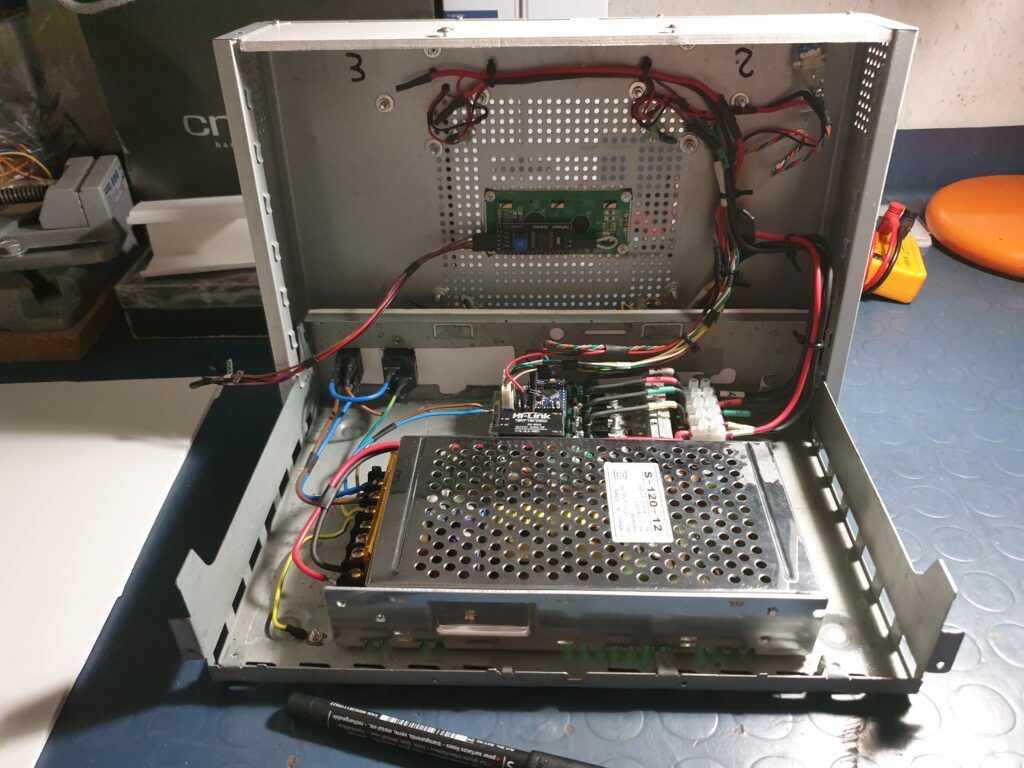
Ogni coppia è fissata su un supporto che permette, oltre a mantenere in posizione le bobine, l’ancoraggio della struttura ad un box di metallo.
All’interno del box sono stati alloggiati anche i componenti hardware.
I supporti per le bobine sono stati progettati tramite il software Fusion 360 e prodotti con l’ausilio di una stampante 3D FDM.
Puoi scaricare i file .stl su Github.
Schema elettrico
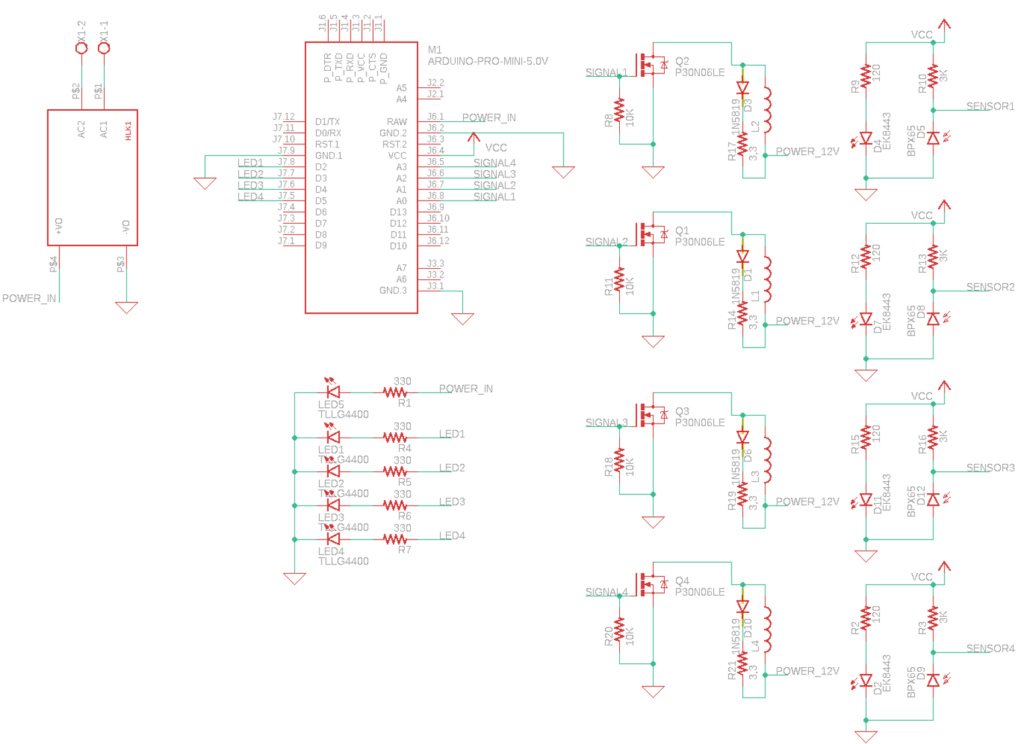
I componenti possono essere saldati su una scheda millefori oppure su un PCB appositamente progettato.
Software
La scheda compatibile Arduino pro mini può essere programmata direttamente attraverso l’IDE ufficiale di Arduino, con la quale è relativamente semplice realizzare degli acceleratori.
Qui di seguito alcuni spezzoni di codice, mentre a questo link trovi il codice completo:
#define sogliaSensore 800
#define MaxAngle 13.0 //angolo massimo durata accensione bobina
#define MinAngle 1.0 //angolo minimo durata accensione bobina
float Angle = 4.0; //angola fissato per la sola partenza
float velocity = 0;
int lastEncoded = 0;
int lastencoderValue = 0;
uint16_t count = 0;
const float diametro = 0.195; //diametro in metri
const float circonferenza = diametro * 3.1416;
float CalcVelocity(float spazio, float tempo)
{
return (float)(spazio / tempo);
}
void MagneticPulse(uint8_t mosfet)
{
TCCR1B &= 0b11111000; //spegni il timer
uint16_t TempoOn = 0;
velocity = 0;
if (TCNT1 > 0)
{
velocity = CalcVelocity(circonferenza / 4.0 , TCNT1 / 15625.0); //velocità media tra un sensore e il successivo
TempoOn = 1000.0 * (Angle / 90.0) * (TCNT1 / 15625.0); //calcola il tempo di accensione di ogni mosfet
TCNT1 = 0; //resetta il contatore del timer1
}
TCCR1B |= 0b00000101; //timer1 con prescaler 1024 -> 15625Hz
if (TempoOn > 0)
{
switch (mosfet) //attivazione mosfet riferito al passaggio dal sensore che lo precede
{
case 1:
digitalWrite(led1, HIGH);
digitalWrite(mosfet1, HIGH);
delay(TempoOn);
digitalWrite(mosfet1, LOW);
digitalWrite(led1, LOW);
break;
case 2:
digitalWrite(led2, HIGH);
digitalWrite(mosfet2, HIGH);
delay(TempoOn);
digitalWrite(mosfet2, LOW);
digitalWrite(led2, LOW);
break;
case 3:
digitalWrite(led3, HIGH);
digitalWrite(mosfet3, HIGH);
delay(TempoOn);
digitalWrite(mosfet3, LOW);
digitalWrite(led3, LOW);
break;
case 4:
digitalWrite(led4, HIGH);
digitalWrite(mosfet4, HIGH);
delay(TempoOn);
digitalWrite(mosfet4, LOW);
digitalWrite(led4, LOW);
break;
}
}
Serial.print("Bobina no."); //parametri stampati sul monitor seriale
Serial.println(mosfet);
Serial.print("Velocità = ");
Serial.print(velocity, 3);
Serial.println(" m/s");
Serial.print("Tempo On = ");
Serial.print(TempoOn);
Serial.println(" mS");
}