I veicoli a guida autonoma, considerati fantascienza fino a un paio di decenni fa, stanno ormai diventando realtà. Ciò che rende possibile questo tipo di applicazione è senza dubbio l’uso di innumerevoli sensori intelligenti ad altissime prestazioni. L’avanzamento tecnologico nel campo digitale e dei microcontrollori ha permesso di realizzare sensori per il mantenimento di corsia, cruise control adattativi, sistemi per il rilevamento di angoli morti durante il sorpasso ed altri ADAS (sistemi avanzati di assistenza alla guida). Questi sistemi di assistenza rappresentano sia una comodità per il guidatore (si pensi per esempio al parcheggio assistito), sia sono espressione della necessità di standard di sicurezza sempre maggiori. Il Protocollo Euro NCAP, che stabilisce gli standard di sicurezza delle auto in Europa e ne definisce i modelli di valutazione, ha già stabilito l’introduzione obbligatoria di un certo set di sistemi ADAS per incrementare la sicurezza degli automobilisti alla guida di veicoli di nuova generazione, grazie ai sistemi LIDAR.
LiDAR: cos’è e come funziona
Uno degli elementi centrali quando si parla di ADAS è senza dubbio il LiDAR, utilizzato nei sistemi di rilevamento pedoni, rilevamento angoli morti, cruise control adattativo e, in generale, in tutte le applicazioni in cui ci sia necessità di rilevare e mappare tutti gli elementi che circondano il veicolo. E’ facile intuire come la progettazione dei LiDAR sia fondamentale per arrivare ad ottenere un veicolo a guida autonoma sicuro.
LiDAR sta per Light Detection and Ranging, cioè rilevamento e misurazione (remota) tramite radiazione elettromagnetica nella la banda ottica. Tale dispositivo applica il classico e semplice principio del suo parente più stretto, il RADAR, ma lo fa utilizzando un fascio di luce, tipicamente impulsi laser: conoscendo la velocità del fascio emesso, il momento dell’emissione dell’impulso e il momento in cui viene rilevato il fascio riflesso, si è in grado di calcolare la distanza dell’oggetto colpito dal fascio. Questa tecnica è chiamata TOF (time-of-flight, tradotto “tempo di volo”), il cui principio è mostrato in Figura 1. Rispetto al RADAR, il dispositivo ottico ha una risoluzione decisamente più alta anche a distanze elevate, ed è così in grado di ottenere immagini tridimensionali ben dettagliate da far elaborare ad una unità centrale per evitare collisioni.
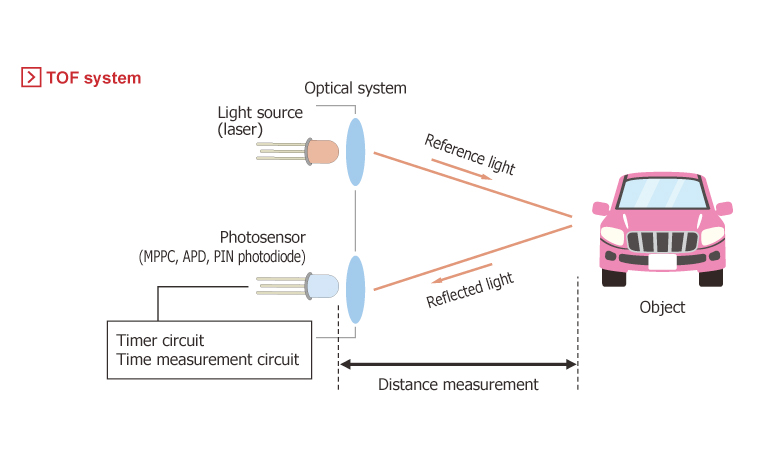
Figura 1: tecnica TOF (source: www.hamamatsu.com)
Di per sé, il principio del LiDAR (sistemi LiDAR) è noto da decenni, e le sue applicazioni hanno coinvolto svariati campi, dal medicale al militare, e per ultimo l’automotive. Ma è proprio l’utilizzo di un fascio laser che pone alcune problematiche tecnologiche di non poco conto: se da un lato il laser si rivela una fonte puntuale ad alta risoluzione, per poter sfruttare appieno questa caratteristica e ricostruire la morfologia dell’ambiente in maniera dettagliata tramite una scansione, dall’altro lato c’è bisogno di elevata precisione meccanica e velocità degli impulsi dell’ordine dei nanosecondi; inoltre, mentre le onde elettromagnetiche dei RADAR hanno un coefficiente di riflessione abbastanza elevato, ciò non si può dire per la luce del laser, con la conseguente necessità di maggiore energia richiesta dal sistema. I fasci di luce del laser vengono generati tramite alte correnti (anche dell’ordine di decine di ampere) che attraversano diodi LED e, per evitare il surriscaldamento del die, il duty-cycle deve essere necessariamente basso.
Elevata velocità di impulso e maggiore energia si traducono, come di consueto, in una richiesta di potenza molto elevata ai dispositivi elettronici che implementano il sistema, e come ben sappiamo, aumentare la potenza del sistema porta inevitabilmente le seguenti problematiche tecnologiche:
- gestione termica dei componenti di potenza e progettazione di dissipatori di calore
- efficienza energetica del circuito
- reperimento di componenti adatti in base alle temperature di rottura
- ottimizzazione del layout delle schede per la minimizzazione delle componenti parassite
Dentro il LiDAR: il driver del laser
Il laser del LiDAR deve essere pilotato da un circuito appositamente progettato, in grado di fornire una grande quantità di corrente in tempi brevissimi. Il più semplice driver è costituito da un componente che faccia da interruttore di corrente, in serie al laser. Una delle topologie di circuito più utilizzate per l’implementazione di tale driver è il circuito risonante a scarica di condensatore, mostrato in Figura 2.
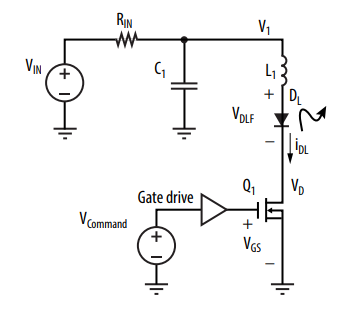
Figura 2: circuito risonante a scarica di condensatore (source: epc-co.com)
Q1 e DL sono rispettivamente lo switch e il diodo LED del laser da attivare. In assenza di comando sullo switch, il condensatore C1 si carica alla tensione VIN. Nel momento in cui Q1 viene acceso, C1 si scarica attraverso DL e l’induttanza L1, con la quale forma un circuito risonante, cosicché la corrente che attraversa il laser sarà un impulso sinusoidale IDL, fino a che la tensione ai capi del diodo LED è maggiore della tensione di forward. Quando la tensione su DL è minore di VDLF, C1 ricomincia a caricarsi.
Per tale circuito valgono i seguenti tempi:
carica di C1:
![]()
scarica risonante:
![]()
mentre l’impedenza equivalente è:
Se tchr è molto più grande di tres, allora la resistenza RIN ha effetti marginali sulla risonanza L1-C1.
I vantaggi di questo semplice circuito sono molteplici:
- se note, possono essere sfruttate le induttanze parassite
- la forma d’onda dell’impulso è nota
- l’energia trasferita al laser è in relazione diretta con VIN (IDLpk = (VIN-VDLF)/R0)
- c’è un solo elemento switching facile da controllare
- la durata dell’impulso trasferito sul laser è minore della durata del tempo di controllo del dispositivo di commutazione
Nel mondo reale, però, dobbiamo scontrarci con l’aspetto tecnologico del circuito: viste le grandi potenze in gioco, l’interruttore deve essere un componente con induttanze parassite prossime allo zero e con velocità di commutazione idealmente infinite. I classici componenti al silicio, come MOSFET o J-FET, non sono in grado di fornire le caratteristiche necessarie all’implementazione di un driver per laser utilizzabile nei sistemi LiDAR come il mercato automotive richiede. Infatti, per fornire elevate potenze, il canale dei MOSFET deve essere di grandi dimensioni, e ciò comporta tempi di carica delle capacità parassite non accettabili, con conseguenti frequenze di commutazione troppo basse per l’applicazione. Inoltre la gestione termica non risulterebbe adeguata, a meno di non utilizzare pesanti ed ingombranti dissipatori di calore.
Dispositivi GaN per soddisfare i parametri richiesti
Far fronte alle problematiche sopra esposte utilizzando componenti al silicio è un’impresa complicata e necessita di ingegneri e progettisti esperti nel campo della potenza e delle alte frequenze. Fortunatamente oggi gli ingegneri elettronici hanno a disposizione gli innovativi dispositivi con tecnologia wide band-gap, con caratteristiche ideali per soddisfare le necessità di sistemi LiDAR che l’automotive richiede. I dispositivi GaN (gallium nitride) hanno una mobilità elettronica centinaia di volte maggiore rispetto ai componenti in silicio, con gap di energia di 3.4 eV. I MOSFET GaN possono vantare, rispetto ai corrispettivi in silicio, le seguenti caratteristiche:
- hanno una minore resistenza RDon di attivazione, che porta a minori perdite in conduzione
- hanno capacità parassite più basse, con conseguente diminuzione di perdite durante la carica/scarica, e quindi maggiori velocità di commutazione
- necessitano di minore potenza per la loro attivazione
- a parità di caratteristiche, i dispositivi sono più piccoli, si surriscaldano di meno e occupano meno spazio sul PCB, ed hanno costi minori
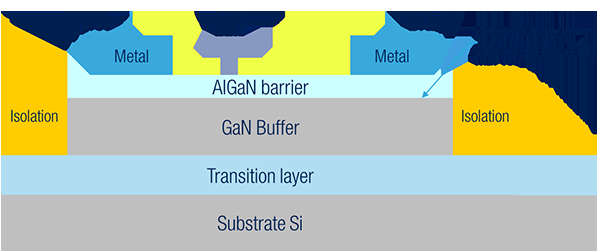
Figura 3: struttura di un dispositivo GaN (source: www.st.com)
Le caratteristiche elencate rispecchiano quelle che sono le necessità degli switch nel circuito driver per laser analizzato precedentemente. Individuata la tecnologia necessaria alla realizzazione, facciamo alcune considerazioni sul dimensionamento dei componenti del driver.
Considerazioni di progetto del driver laser LiDAR
Cominciamo da quelli che sono i requisiti di base per dimensionare i componenti del circuito, per poi scegliere i dispositivi GaN MOSFET adatti allo scopo. I parametri di base sono la corrente di picco IDLpk che scorre sul diodo LED, l’ampiezza temporale dell’impulso (tw), la frequenza degli impulsi, e la caduta di tensione per il current forward sul diodo LED (indicato con VDLF).
Dall’equazione dell’impedenza equivalente, considerando che IDLpk=(VIN-VDLF)/R0, e fissando il valore di L1 (che per semplicità di realizzazione circuitale deve essere il più basso possibile), ricaviamo C1=L1*(IDLpk/(VIN-VDLF))2. Essendo VIN=((2**L1)/(3tw))*IDLpk+VDLF, otteniamo i valori di IDLpk e VIN necessari per individuare il dispositivo GaN MOSFET più adatto alle nostre esigenze di progettazione. Ulteriori considerazioni possono essere fatte sulla natura dei segnali coinvolti nell’applicazione, che suggeriscono un approccio di progettazione tipico dei circuiti RF, ma anche sui materiali costruttivi dei componenti a contorno come resistenza e capacità del circuito risonante di carica-scarica.
Conclusioni
L’utilizzo dei componenti GaN in dispositivi commerciali è solo alla sua fase iniziale. Le soluzioni tecnologiche che fino a pochi anni fa erano impensabili o di complicata progettazione si stanno rivelando vincenti in molti ambiti, come il caso del driver di potenza per sistemi LiDAR, e questa considerazione è l’ennesima conferma che nei prossimi anni, nel campo dell’elettronica di potenza, la scena sarà dominata dai dispositivi WBG, capaci di superare i limiti tecnologici dei “vecchi” semiconduttori.